��ժ���������ܱ��Ͼ���ϵͳ������ZigBee�͵�Ƭ��
���ࣺ���ܿ�ѧ�������ķ��� ʱ�䣺2018-08-08 10:44 ��ע��(1)
�������������ž�
����(������Ϣְҵ����ѧԺ����ѧԺ�����ճ���213164)
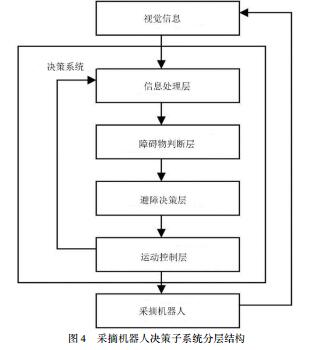
����ժҪ:���Ƚ�������ײΣ�նȵ�ԭ�����㷨�����ھ��ߡ��Ӿ��ɼ����˶����ƺ�ZigBee����ͨѶ4����ϵͳ����˲�ժ���������ܱ��Ͼ���ϵͳ;Ȼ������ģ����������ʵ���˻����˱��Ϲ��ܣ�����ϵͳ������MatLab�������顣�������:ϵͳ����ȫ�ܿ��ϰ�����ҿ��������滮���ű���·�����������Ҫ��֤�������ܱ��Ͼ���ϵͳ�Ŀɿ��ԺͿ����ԡ�
�����ؼ���:��ժ������;���ܱ���;����ϵͳ;ZigBee;��ײΣ�ն�;MatLab
������ͼ�����:S225.93;TP242���ױ�ʶ��:A���±��:1003-188X(2018)12-0130-05
����0����
���������ҹ���ũҵ����ģʽ������ũҵ�Ƽ���Ӧ�ã������������������Ͷ�������Ϊũҵ����������������ʵ��ժ��ũҵ�����з����ȡ����Ӷ����IJ��裬��������˷�չDZ�����Ļ���ZigBee���ߴ��������ģ���������ۣ�����˲�ժ���������ܱ��Ͼ���ϵͳ��ʵ���˲�ժ�����˵Ŀ��ٱ��ϣ��Բ�ժ�����˱����滮������·���滮����һ���IJο���ֵ��
����1��ժ��������ײΣ�ն�
������ժ�������ƶ������е���Ҫ������ʵ�ֱ��ϡ���ͳ�����о��У�ͨ���Ǹ��ݴ����������ϰ�����룬Ȼ��ͨ����ժ���������ϰ���֮��ľ��������ײΣ�ն��жϡ������о��������������ȷ��ȫ���������ײΣ�ճ̶ȣ�����ڱܿ��ϰ���Ĺ�������ʵ��·�������Ż����ڲ�ժ�������ƶ����̵��˶�ѧ�о��У������˵�λ�á��ƶ��ٶȡ����ٶȼ����ϰ����ƫת�Ƕȶ�����һ���Ĺ����ȣ���˲�ժ�����˵���ײΣ�ն�Ӧ�ô���4��������п��ǡ�Ϊ�˼�����̣��о��м����ϰ�����ƶ��ٶȱ��ֲ��䣬�������ݶ��߾��롢ƫת�ǶȺ�����ٶ���������ײΣ�նȡ���ժ������M���ϰ���OBS��λ�ù�ϵ��ͼ1��ʾ��
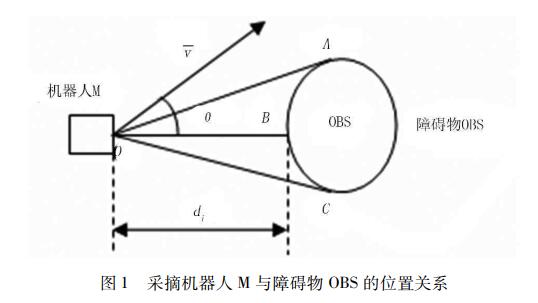
�����Ĺ�ϵ;θmin��θmax�ֱ�Ϊ��ȫ�ǶȺ����Ƕ�;dmin��dmax�ֱ�Ϊ��ȫ����������롣��ժ�����˸�����ײΣ�նȱ��ϵ�����:�ٸ��ݻ�����Ϣ�Բ�ժ�����˽��г�ʼ������;�ڸ�����Ƶ�ɼ�ϵͳ��ȡ�ܱ�����Ϣ;�۷����ϰ�������ժ�����˵���ײΣ�ն�;�ܸ�����ײΣ�նȣ��������ű��ϲ���;����������ϵͳ�ܿ��ϰ���ǰ�С�
����2��ժ���������ܾ���ϵͳ�����
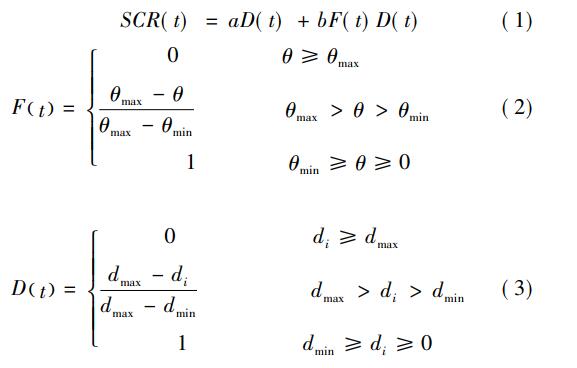
������ժ���������ܾ���ϵͳ��PC��Ϊ���壬�����Ӿ��ɼ�ϵͳ��ͼ����Ϣ�������ײΣ�նȣ���PC�����Կ�ѡ����ʵı��Ͼ��߷�ʽ��Ȼ��ͨ��ZigBee����ͨ���������ժ�����˷���ָ�ʵ�ֶԲ�ժ�����˵�Զ�̱��Ͽ��ơ����ܾ���ϵͳ��Ҫ���Ӿ��ɼ���ZigBee����ͨѶ������ϵͳ���˶�����ϵͳ��4���ֹ��ɡ���ժ���������ܾ���ϵͳ�����ͼ2��ʾ��
����2.1������ϵͳ
����������ϵͳ�Ǹ�����Ƶ�ɼ�ϵͳ��ȡ��ͼ����Ϣ���Բ�ժ�������ܱ������з�������������������������̣��ƶ����ʵ��ƶ����ԣ�ʵ�ֲ�ժ�����˵��������ϡ�������ϵͳ����˼����ʵ�־�����Ϣ��״̬��������ӳ�䣬�����ܱ�����Ϣ��ȷ������·�ߡ�������ϵͳ�Dz�ժ���������ܾ���ϵͳ����Ҫ���֣�����ƿ����ͼ3��ʾ��
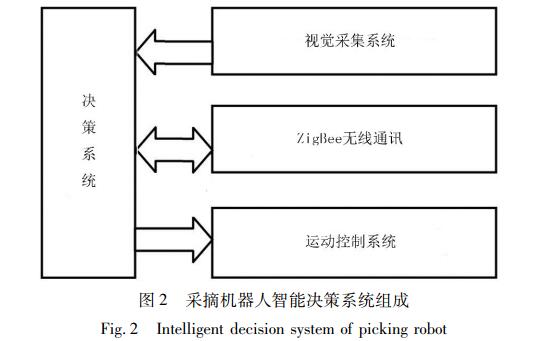
����ͼ3�У���ժ�����˾�����ϵͳ�ľ���������Ҫ�����Ӿ��ɼ�ϵͳ�������߳������Ӧ��������Ϣ����PC�˵��㷨�洢�⣬���ߵĽ�ϱ���Եõ������㷨�ķ�������ܹ�ʵ�ֶԲ�ժ�����˵��˶����ơ����IJ��÷ֲ�ʽ�ľ��߿��Ʒ�ʽʵ�ֲ�ժ�����˵ľ�����ϵͳ����ͼ4��ʾ��

����2.2�Ӿ��ɼ���ϵͳ
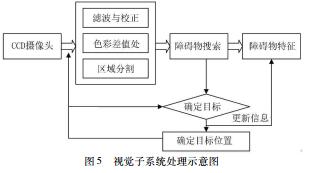
�����Ӿ��ɼ���ϵͳ��Ϊ��ժ�����˵��۾�����CCD�Ӿ���������ͼ��ɼ�����Ӳ���豸��ͼ�����������ɡ��Ӿ��ɼ���ϵͳ�Dz�ժ�����˻�ȡ�ܱ�����Ŀ������ϰ������꼰������ʵ��λ�õ���Ҫ�ֶΣ���Ϊ������ϵͳ�Ĺ滮�ṩ�ɿ���Ϣ������ͨ���������������������ȣ���ժ�����˵���ҵ������Ŀ���������ʱ���Զ������ӣ���˶���Ƶ�ɼ�ϵͳ��Ҫ����ߡ��Ӿ��ɼ���ϵͳ���������:��ȷ����ҵ������ϰ�����Ϣ�������ժ������֮��ľ��롢�Ƕ���Ϣ;�ڲ�ժ�������˶����Ƶ�ʵʱ�滮���Ӿ���ϵͳ����ʾ����ͼ5��ʾ��
����2.3�˶�������ϵͳ
�����˶�������ϵͳ��Ҫ���˶����ƿ��͵������ģ�鹹��(��ͼ6)��������ʵ�ֶԵ�����������˶����ƿ����������˶����ٶȿ��Ƽ�λ���㷨�ȡ�
����2.4ZigBee����ͨѶ��ϵͳ
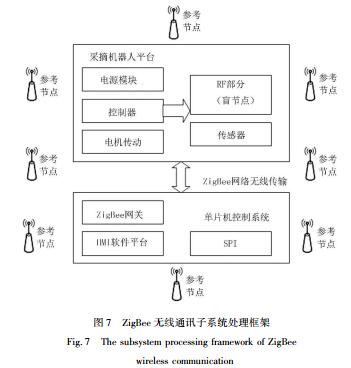
����ZigBee����ͨѶ��ϵͳ������ժ������ƽ̨��ZigBee����ͨѶģ�鼰��Ƭ������ϵͳ3���֣�ʵ��PC������ժ�����˾�����ϵͳ����Ƶ�ɼ���ϵͳ֮�����Ϣ������ZigBee����ͨѶ��ϵͳ���������ͼ7��ʾ��ͼ7ZigBee����ͨѶ��ϵͳ�������Fig.7ThesubsystemprocessingframeworkofZigBeewirelesscommunication��ϵͳ�ĵ�Ƭ������ϵͳ��ZigBee���ء�ZigBee�ο��ڵ㡢HMI����ƽ̨��SPI����Դģ�顢����������������ʹ������ȹ��ɡ�����ԭ��Ϊ:��HMI����ƽ̨���ݲο��ڵ���Ϣ�������ߣ�������Ϣͨ��SPI���ڴ���ZigBee���أ����䷢���ȥ;Ȼ���ɲ�ժ�������ϵ�ZigBee����ͨ��ģ���������������������������˶����ƻ���ִ��;ͬʱ����ժ�������ϵ���Ƶ����������ݲɼ����Ļ�����Ϣ��ͨ��ZigBee����ͨ��ģ�鴫�����̨PC����PC�˸��ݷ��������ݽ��з�������ȡ���ϴ�ʩ��
����3��ժ�����������������
��������ѡ�õ�CCD��Ƶ�������Ͷ���Ƕȴ��������ѽ���һ��ȷ��ʵʱ����ģ�ͣ����滮��ժ�����˵��˶���Ϊ��һ�㾭��Ŀ��Ʒ�����Ҫ������ѧģ�ͣ�Ϊ�˽����һ���ӵĽ�ģ���̣����IJ���ģ���������۽��в�ժ�����˵�����������ơ��÷������������ϵ�Ķ������һ�����壬ϵͳ����ģ��������ʽ����һ���ջ�����ϵͳ��ģ������ϵͳ��Ҫ����֪ʶ�⡢ģ��������ģ������������Ԫ�Ȳ��֣���ͼ8��ʾ��
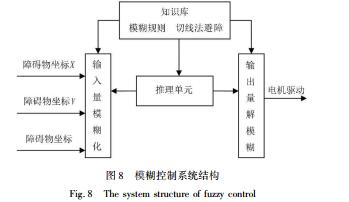
����ͼ8ģ������ϵͳ�ṹFig.8Thesystemstructureoffuzzycontrol����ժ�����˱����㷨����ģ�������㷨������IF-Then�������ϰ����λ�ù�ϵ���в���:���ϰ����ڻ�������ǰ��������ǰ�������ȡ��ת�ܿ�����;���ϰ����ڻ�������ǰ�������ȡ��ת�ܿ����ԡ���ժ������ģ������ϵͳ������Ƶ�ɼ�ͼ����Ϣ�ںϽ������ϻ����˵�ǰλ����Ϣ���ƶ��������ı��Ͼ��ߣ�������ƫת�ǶȺ��ƶ��ٶȡ�����ʵ�������Ҫ���趨�ϰ��������Ϣ�ֱ���L-sensor(��)��F-sensor(ǰ��)��R-sensor(�ҷ�)��ʾ;��ײΣ�ն��Ӽ�Ϊ{Z��S��M��B}���ֱ��ʾ�ޡ�С���кʹ�;���Ʋ�����Ϣ�ֱ�Ϊ:VL(��ǰ���ٶ�)��VR(��ǰ���ٶ�)��θ(ƫת��);����ǰ�������ٶ��Ӽ�Ϊ{ֹͣ���������ʺϣ��Ͽ죬ȫ��}={stop��slow��med��fast��full};ƫת���Ӽ�Ϊ{����С��ֱ�У���С������}={NB��NS��Z��PS��PB}���Ƕȷ�ΧΪ����60°;���ݹ�ʽ(1)��ѡ��a=1��b=1�����ݾ������õ��Ŀ��ƹ������1��ʾ��
����5����
������Բ�ժ����������ҵ�������ϰ���ࡢ����·���滮�Ѷȴ�����⣬�������������о������ȣ�����������ײΣ�նȺ�ģ���������ۣ����ϰ��������ͽǶ���Ϣ��Ϊ��ײΣ�ն�����������ʵ���ϰ������ժ�����˼��ȷ������ͬʱ��ͨ��ZigBee����ͨ��ģ�齫������Ϣ�������̨PC����PC�˸��ݷ����������ݷ����������ϴ�ʩ����������������:ϵͳ����ȫ�ܿ��ϰ�����ҿ��������滮���ű���·�����������Ҫ��
���������:
����[1]�����壬���Οj��������.�����˱ܿ�������ϰ����·���滮����[J].�����������Ӧ�ã�2004(11):52-54.
����[2]����������˧����������.ũҵ��ժ�����˿���ϵͳ������о�[J].���Ӳ��ԣ�2017(4):15��18.
����[3]���壬�����ǣ�����.����MSP430F149���ܼ�ص�ƻ����ժ���������[J].ũ�����о���2016��38(9):234-238.
����[4]���ͥ����ƽ.�����ƶ�ʽˮ����ժ���������—���ڻ����Ӿ�����[J].ũ�����о���2016��38(8):179-183.
ѧ��������ϸ
-
01
Ԥ������
����Ԥ��Ͷ��ǰָ����רҵѧ���������½������ۣ�
�����ѯ -
02
��ɫ�༭
У�Ա༭�������ɫ,�ø������ѧ���淶����ʽ�����ȱ���
�����ѯ -
03
ѧ������
���������ͽṹ�������ƺ͵������������£�ȷ������ﵽҪ��
�����ѯ -
04
���²���
���ݿ�������ڿ������¡��鼮�����顢Ԥӡ�顢�ٿ�ȫ���ժҪ�ȣ�
�����ѯ -
05
�ڿ��Ƽ�
���������ڿ�ѡ��ʱ��������·�����̸�������յ����ڣ�
�����ѯ -
06
�����ʽ��
����Ŀ���ڿ���ʽҪ����������½���ȫ��ĸ�ʽ�ĺ͵�����
�����ѯ -
07
Э���ύ���
�������߽�����ύ��Ŀ���ڿ�Ͷ��ϵͳ�������˸��ܸ��ʣ�
�����ѯ -
08
Ͷ�帽��ָ��
�������ṩ�ĸ�����ݣ�ָ�����Ͷ�帽�ţ�cover letter����
�����ѯ
��ʱѡ�� ���װ���
���ڸ���
- 2024-03-09�־��۲ο���������
- 2024-03-09��ȫ�뻷��ѧ���Ǻ����ڿ���
- 2024-04-07�ܽᣡ����ʦְ�ƽ�����������
- 2024-03-08Biochemical Engineering JournalͶ�������
- 2024-03-08һ����ͨѶ�����ĸ���������
- 2024-03-08��̬��ѧ�������ڿ���
- 2024-03-08����ר��������Ҫ����ʲô����
- 2024-03-08springer���������µ��ڿ�
- 2024-03-07������Ա�൱��ʲôְ��
- 2024-03-07Ӣ������о�����Ҫ����
SCI�ڿ��Ƽ�
- 2022-12-16sci������online��һ������
- 2023-07-18�Ź��е��SCI�ڿ���
- 2018-08-01sci�ڿ������ظ��ʲ��ܳ������٣�
- 2021-01-05��ҵ���Ŀ��Ե�sci�ڿ�����Щ
- 2019-04-17SCI���ķ�����Ҫע��ʲô
- 2022-10-15����ѽϵ͵�ҽѧ��sci�ڿ�
- 2022-11-03ҩ��ѧsci�ڿ�Ӱ����������
- 2024-02-22ҩѧ��־sci�Ƽ���Щ
- 2018-10-25sci��Ҫע��������
- 2020-12-19�����Ʒ����sci��־����Щ